На каждой покатушке так или иначе встает вопрос оффлайн навигации по спутниковым картам. Как правило, в лесу нет не то, что интернета, а, банально, связи, поэтому перед тем как въехать в лес, проводник, как правило, с помощью Гугл.Карт прокачивает спутниковые снимки себе в кэш.
Этот способ навигации очень неудобен. Часто бывают моменты, когда по той или иной причине спутниковые карты не подгружаются даже из кэша. Толком не работает масштабирование. Ну и производительность всего этого добра оставляет желать лучшего. До недавнего времени меня это не особо волновало, но на днях я все-таки решил озадачиться данным вопросом.
Постановка задачи: возможность пользоваться спутниковыми снимками гугла в оффлайне.
Изучая интернет на эту тему, натыкаюсь на программу OruxMaps. Начинаю изучать возможности данной программы и понимаю, что это то, что нужно. По статьям в интернете должно все заработать так, как я хочу.
Решил попробовать разобраться с этой программой. В Play Маркете данной программы нет, поэтому идем на официальный сайт и скачиваем её к себе на смартфон.
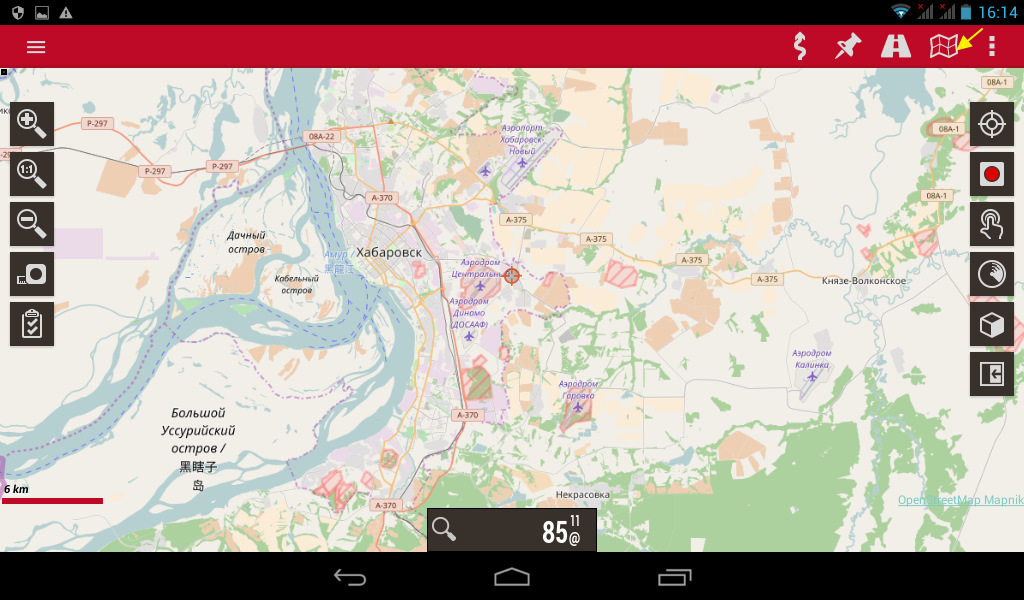
Скачав .apk пакет, устанавливаем его. После установки запускаем приложение OruxMaps и наблюдаем вот такое окно:
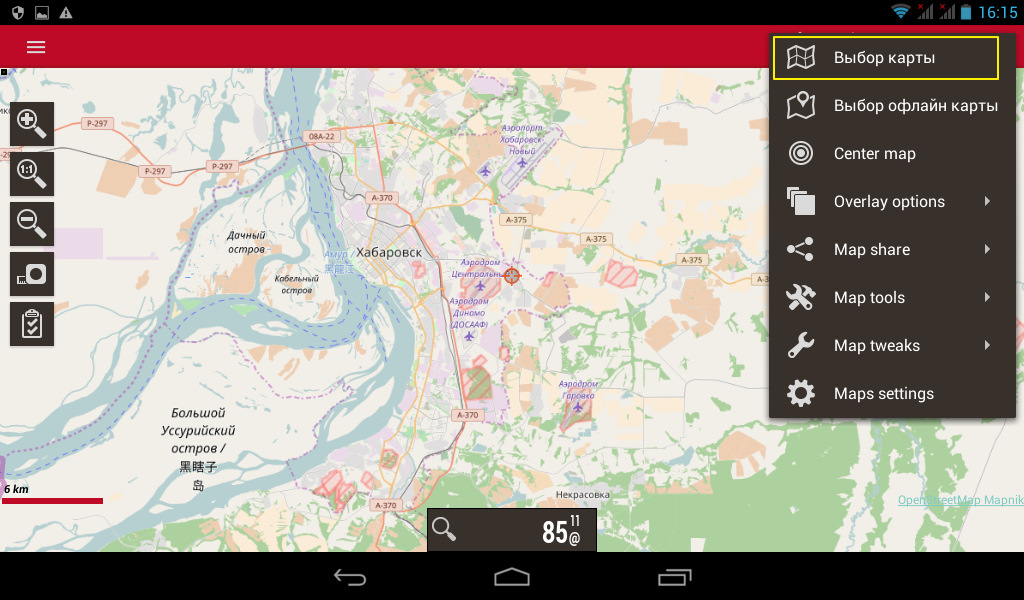
Интерфейс у программы не особо дружелюбный, но зато возможности покрывают данный недостаток. Итак. Теперь перейдем к списку карт. Для этого в правом верхнем углу нажимаем на пиктограмму карты и видим вот такое меню:
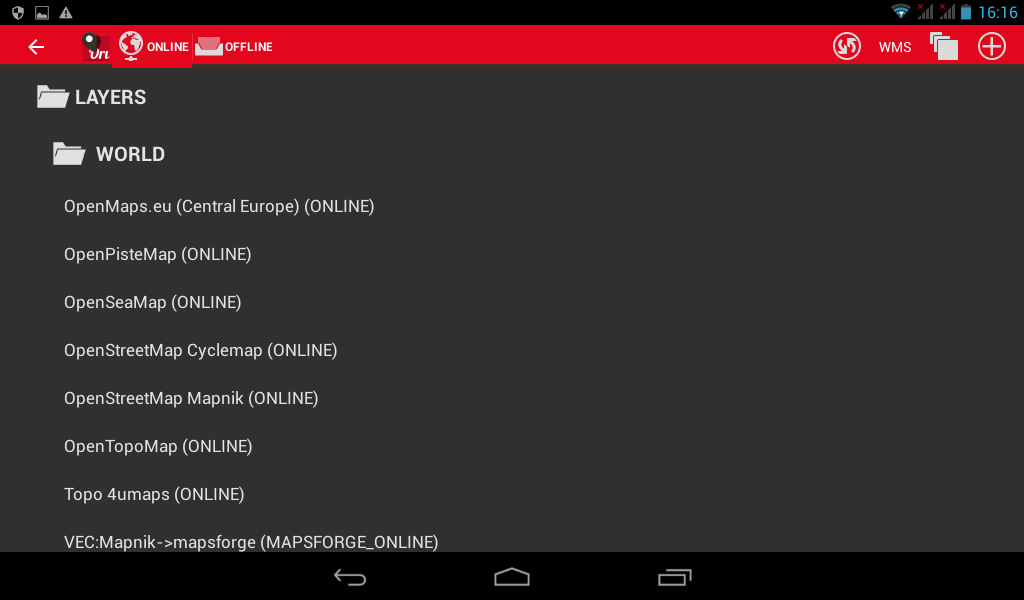
Далее нажимаем "Выбор карты" и получаем вот такой список:
В первый раз, когда я это увидел, подумал, что за хрень, куда тыкать? На самом деле здесь все просто. Перед вами просто список доступных онлайн сервисов, с которых OruxMaps просто подгружает карты. Можете ради интереса потыкать их, может ченить интересного найдете.
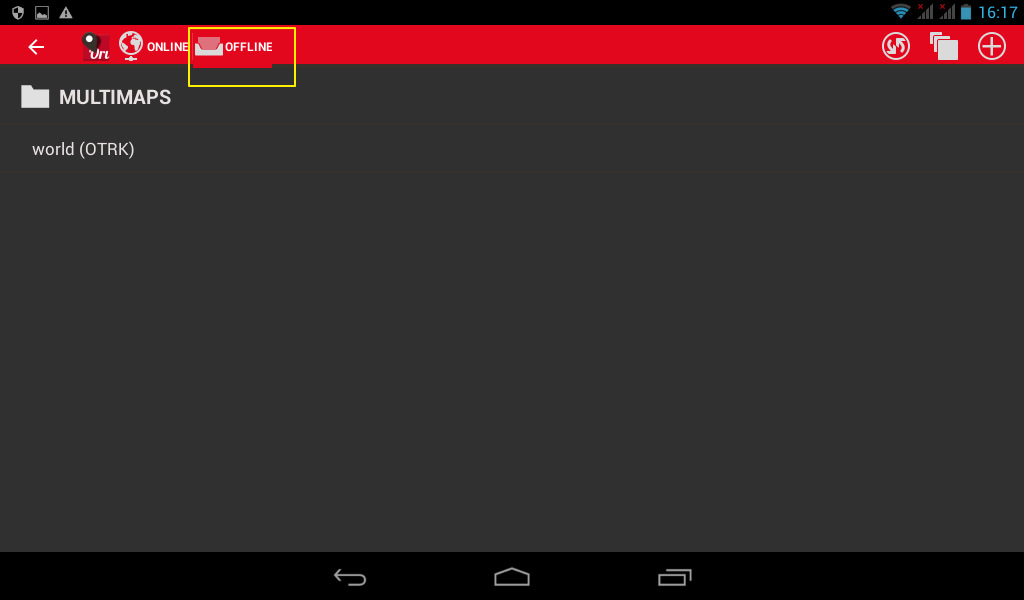
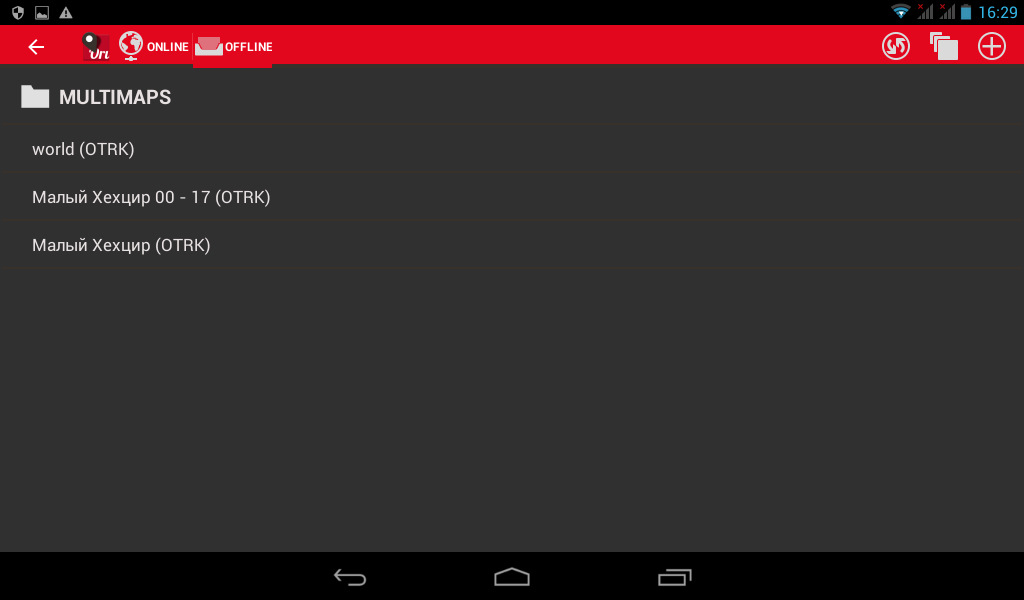
Ну это то, что касается онлайн карт. Если вы перейдете на соседнюю вкладку "OFFLINE", то увидите список доступных оффлайн карт:
Карта "world" по сути просто карта заглушка. Теперь переходим к самому интересному, а именно, интеграции спутниковых карт гугла в OruxMaps. Чтобы это сделать, необходимо скачать вот этот файл:
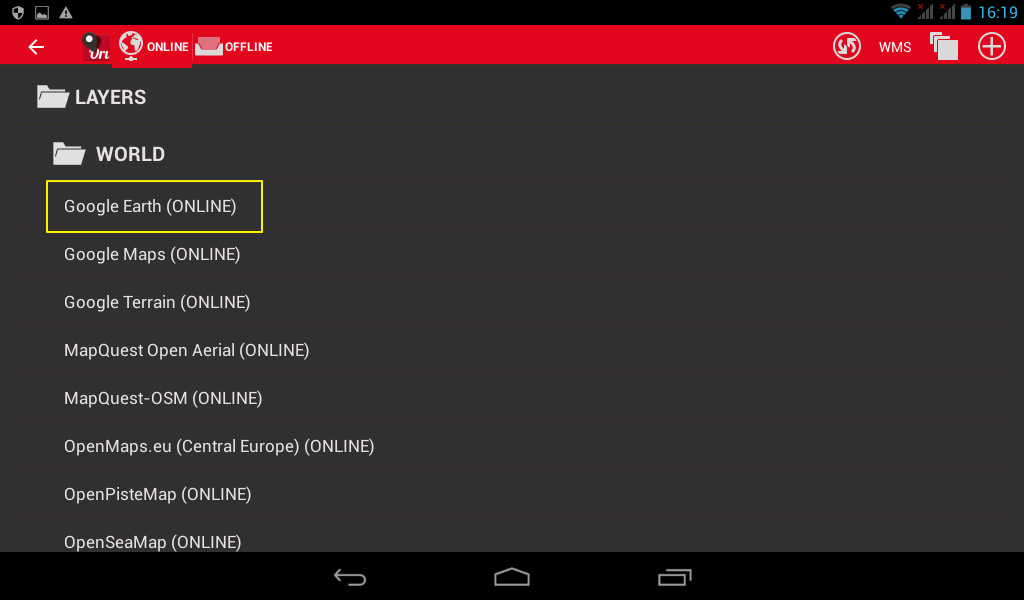
Далее копируем этот файл в папку oruxmaps/mapfiles. На вопрос, перезаписать имеющийся в этой папке файл? отвечаем "Да". Далее перезаходим в программу и открываем список ONLINE карт:
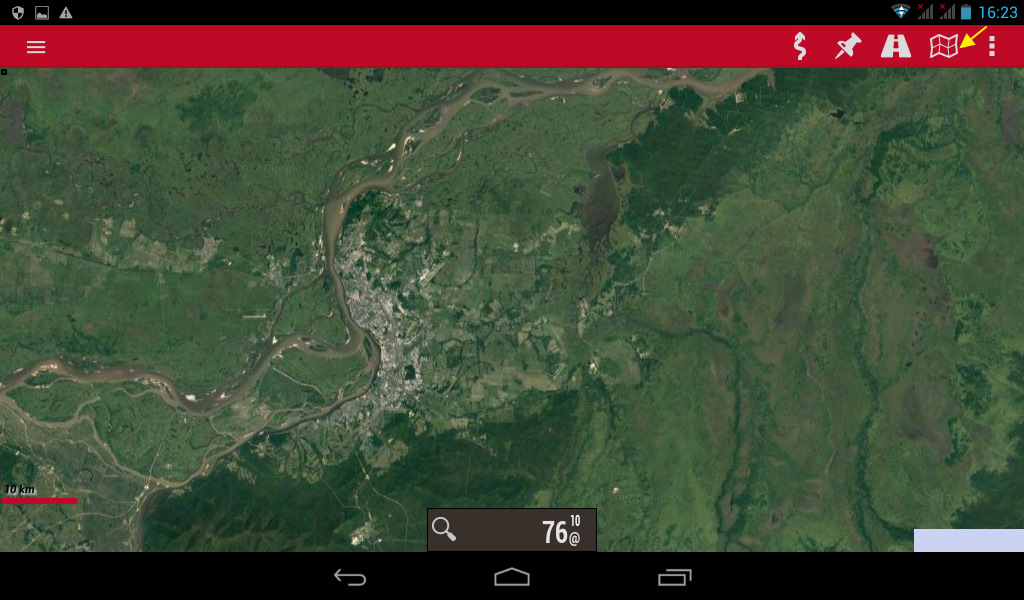
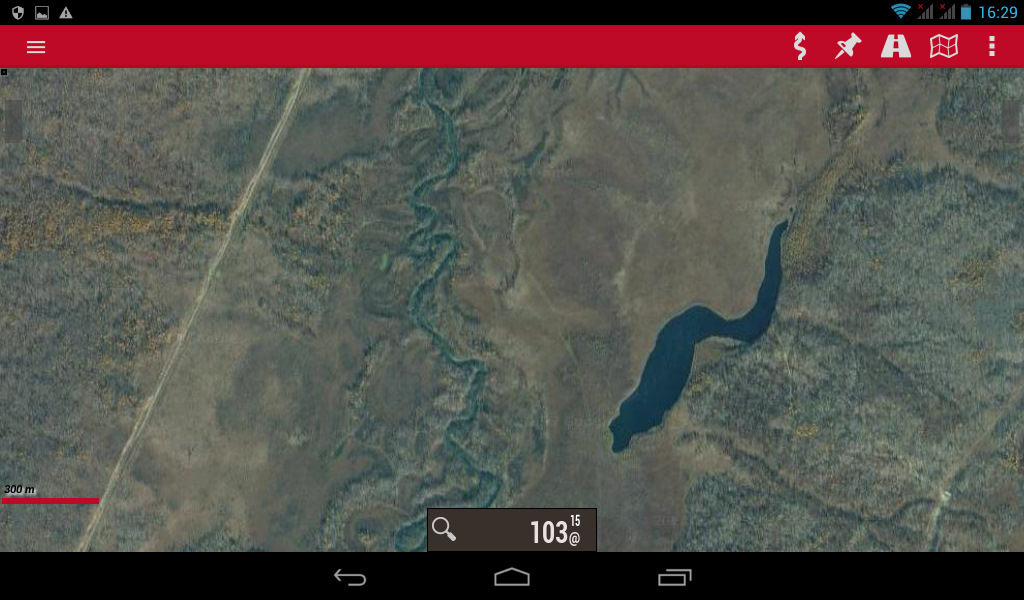
Как видим, в списке появились карты гугла. Нажимаем на Goole Earth (ONLINE) и видим обычные спутниковые карты гугла:
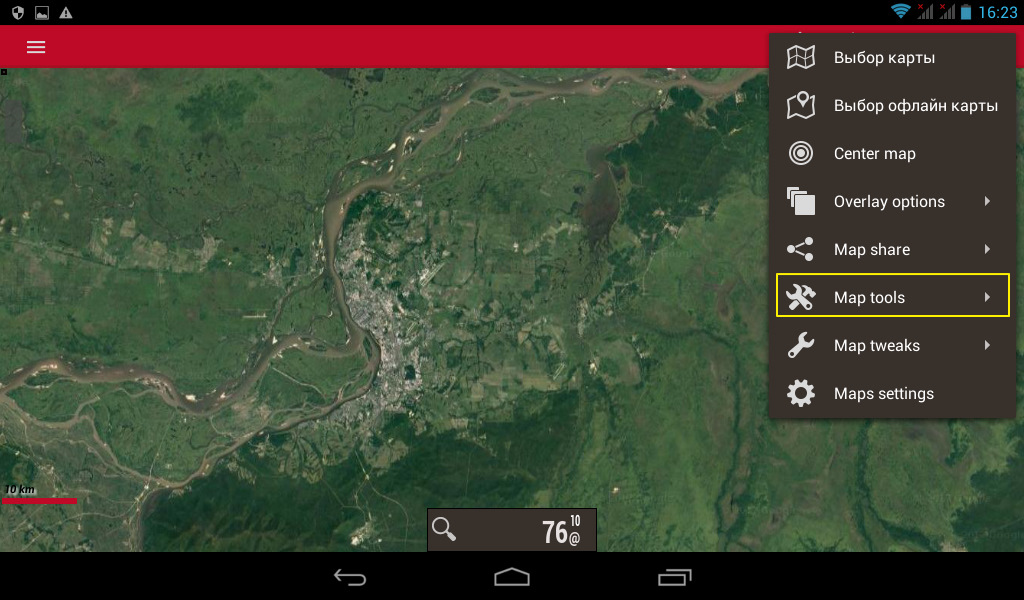
Теперь нам необходимо на базе этих онлайн карт сделать для себя оффлан карты нужных нам областей. Для этого нажимаем на пиктограмму карты. Видим меню, в котором выбираем "Map tools":
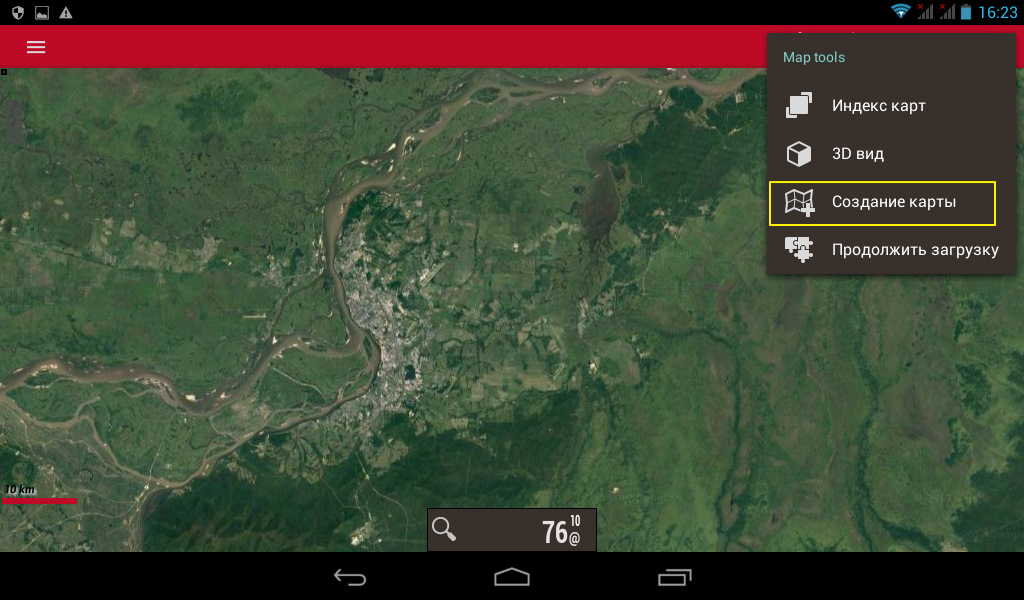
А теперь жмем "Создание карты":
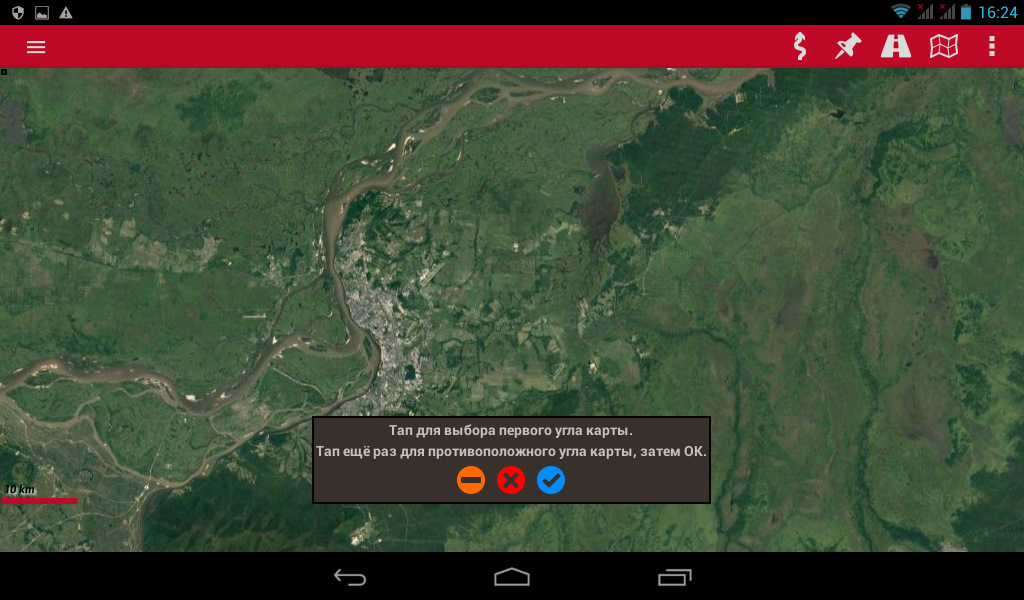
После этого появится информационное окошко с описанием последовательности действий:
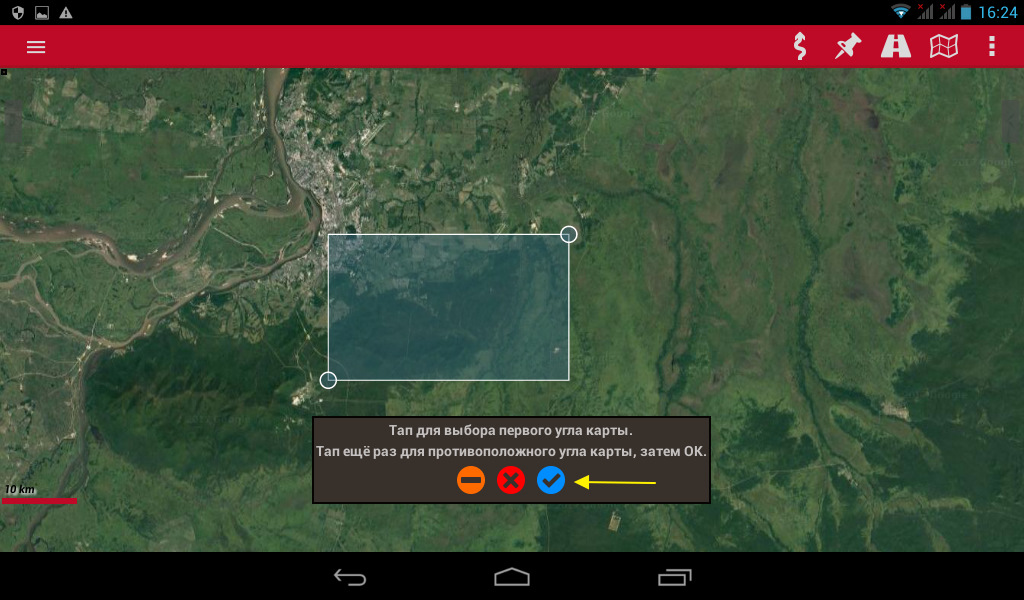
Все, что вам нужно, так это выделить нужную область на карте. Просто тыкните пару раз по карте в разных местах, и вы быстро поймете, что к чему. Стоит особо отметить, что не следует выбирать очень большую область. У OruxMaps есть ограничения на размер за раз скачиваемой области.
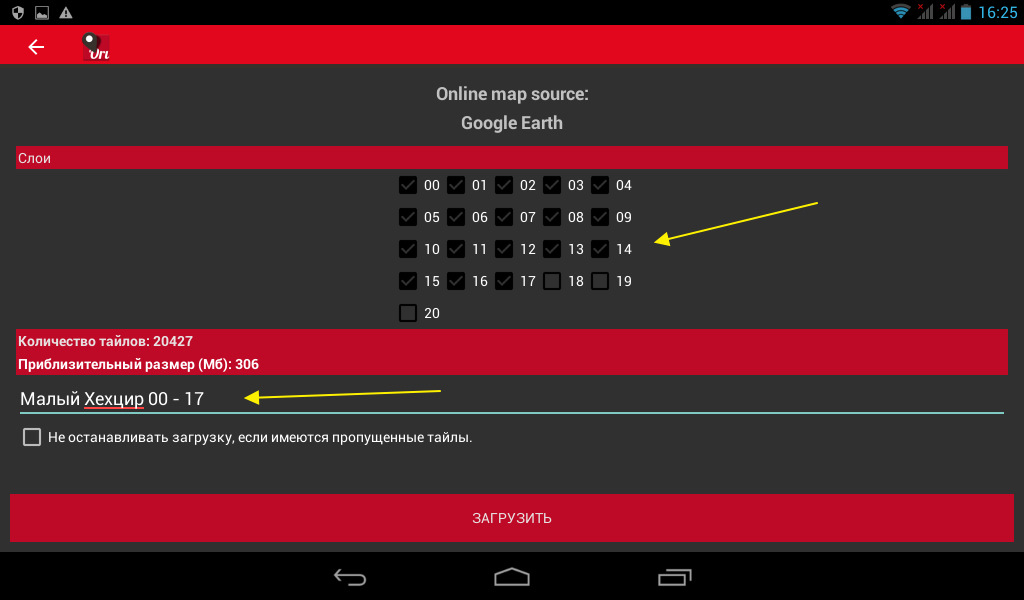
Когда необходимая область выбрана, нажмите на синий значок "V". После этого вы увидите вот такое конфигурационное окно:
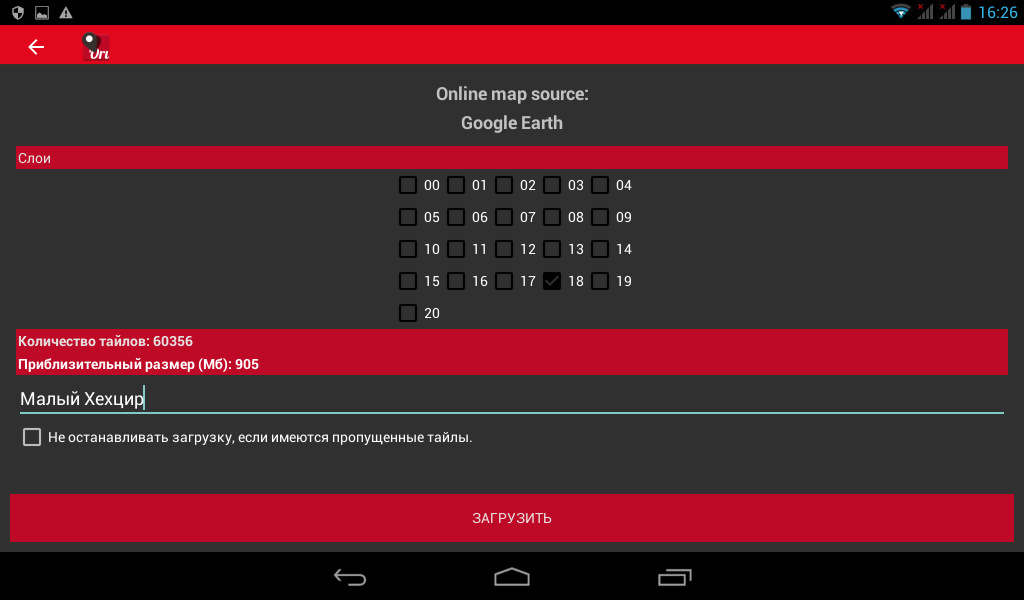
Здесь все достаточно просто. Вам необходимо ввести название оффлайн карты и уровень детализации. Как видно выше, я выбрал от 00 до 17. Если поставить 18, то карта будет очень большой. Чтобы обойти это ограничение, я ту же саму область закачал вот так:
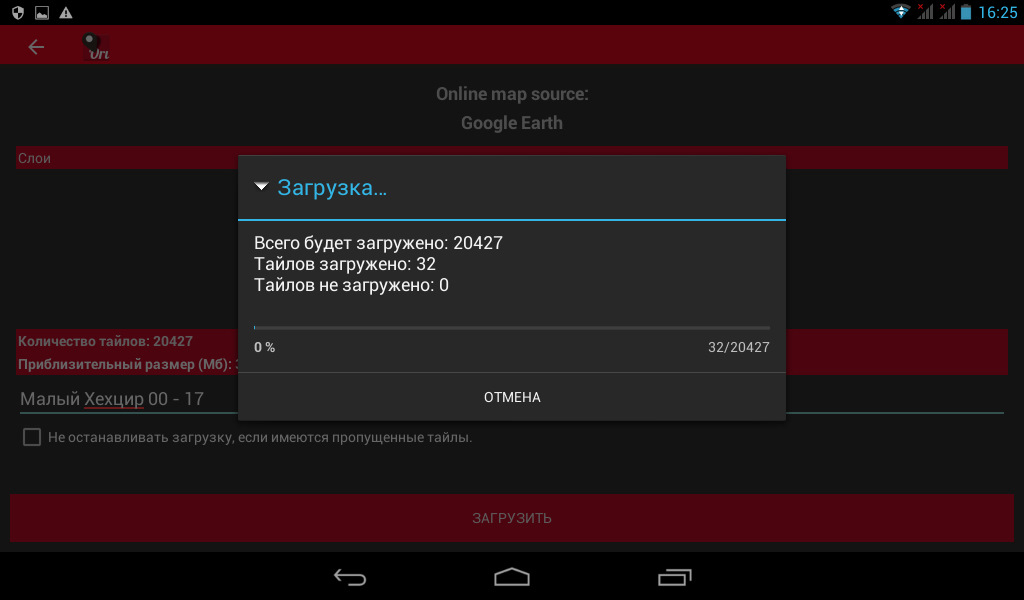
После того, как вы проставили везде галочки и ввели название, необходимо нажать кнопку "Загрузить". Далее вы увидите окно загрузки:
У меня карты загружались часов по 5, поэтому я запускал данный процесс только на ночь. За один раз можно скачать только одну область. То есть, нельзя поставить на закачку сразу несколько областей.
После того, как карты загрузятся, вы их сможете увидеть в списке оффлайн карт:
Всё. Теперь вы можете выбрать карту и осуществлять навигацию по ней:
Что еще прикольно, так это то, что OruxMaps автоматически переходит между оффлайн картами, когда вы перемещаетесь из одной области в другую. То есть, можно понакачать нужных областей и потом абсолютно бесшовно по ним передвигаться.
Я уже успел попользоваться в лесу OruxMaps. Программа работает просто супер, даже как-то поначалу и не верилось, что теперь у меня спутниковые карты Хабаровска и его окрестностей есть в телефоне в режиме полного оффлайна.
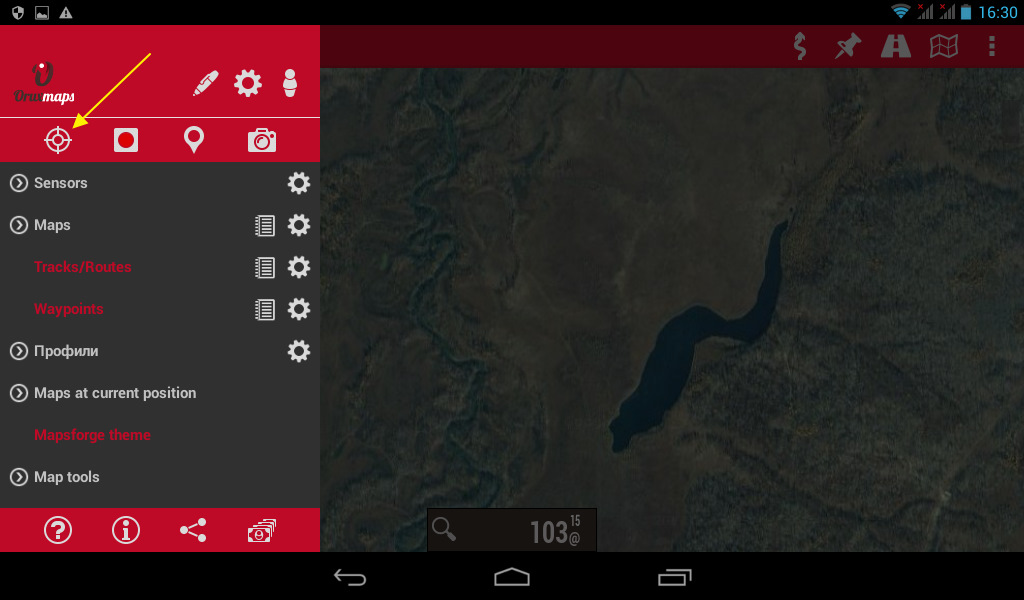
И да. Совсем забыл. Чтобы включить навигацию по этим оффлайн картам, необходимо нажать на значок "Цели":
Найти это меню можно, нажав вот сюда:
Кто еще до сих пор перед поездкой в лес закачивает спутниковые снимки в кэш — бросьте эту затею. Используйте OruxMaps она реально работает.